 重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)

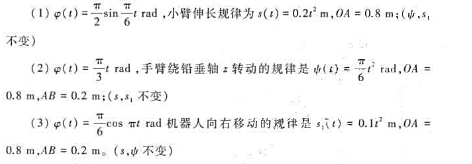
其中, 。试列写该机器人的状态方程。
。试列写该机器人的状态方程。
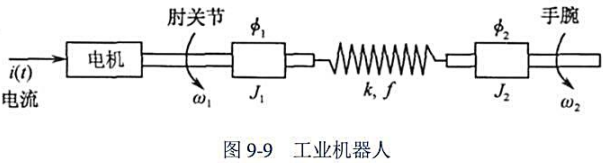
 更多“设工业机器人如图9-9所示,其中两相伺服电机转动肘关节之后,通过小臂移动机器人的手腕。假定弹”相关的问题
更多“设工业机器人如图9-9所示,其中两相伺服电机转动肘关节之后,通过小臂移动机器人的手腕。假定弹”相关的问题
第1题
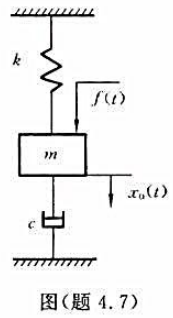
外力 由实验得到系稳态响应为
由实验得到系稳态响应为 试确定k和c。
试确定k和c。
第2题
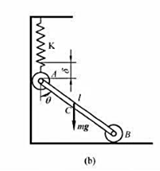
的刚度系数k=200N/m,θ=0时弹簧为原长。求系统的平衡位置,并分析其稳定性。
第3题
差ess(∞)。
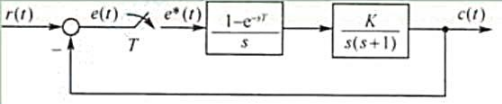
图7-6闭环离散系统
第4题
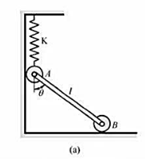
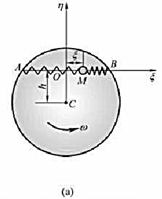
质点被2个弹簧系住,弹簧的刚度系数各为k/2,设点O为质点相对平衡的位置。求质点的自由振动周期。


第5题
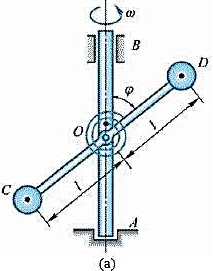
所示。试分别在下列各种条件下求手腕处点B的绝对速度和绝对加速度。
第6题
第7题

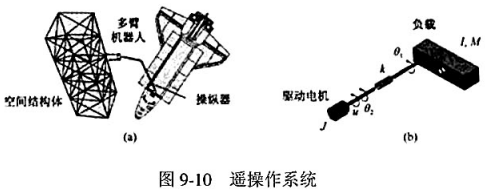
试列写柔性机械臂系统的线性化状态方程。
第8题
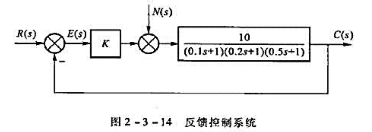
的稳态误差为enn=-0.099?
第9题
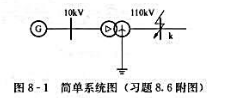
简单系统如图8-1所示。已知元件参数如下:

试分别计算k点发生单相接地、两相短路、两相接地短路和三相短路时的短路电流有名值,并进行比较分析。
第10题
设离散系统如图7-5所示,其中采样周期T=0.2,K=10, r (t) =1+t+t2/ 2,试用终值定理法计算系统的稳态误差ess(∞)。
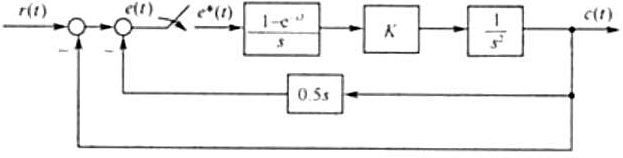
图7-5闭环离散系统
 客服
客服
 TOP
TOP

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!
































