 重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)

试列写柔性机械臂系统的线性化状态方程。
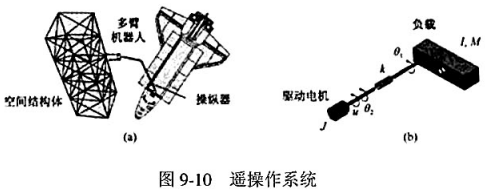
 更多“为了完成空间站装配、卫星捕获等空间操作,航天飞机的货舱内装备了一种可膨胀机械臂的遥操作系”相关的问题
更多“为了完成空间站装配、卫星捕获等空间操作,航天飞机的货舱内装备了一种可膨胀机械臂的遥操作系”相关的问题
第1题
示,图中显示宇航员站在机械臂上工作的情况。该卫星回收系统结构图如图6-22 (b)所示。要求:
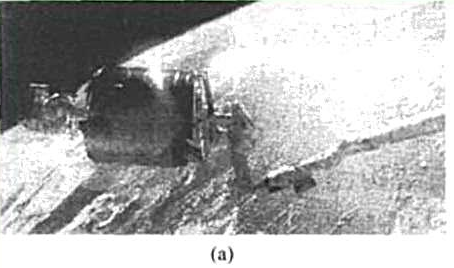
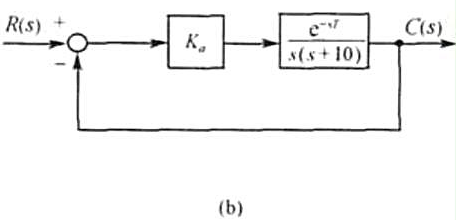
图6-22卫星回收控制系统
(1)当T=0.1时,确定Ka的取值,使系统的相角裕度γ=50°;
(2)当T=0.5时,仍采用(1) 中确定的Ka,求此时系统的相角裕度γ1;
(3)当T=0.5时,若要求γ1=50°,试问Ka值应如何改变?
第2题
A、与宇宙飞船相比,航天飞机对航天员的身体要求较低
B、与宇宙飞船、宇宙空间站相比,航天飞机的技术更简单
C、发射最多、用途最广的飞船是卫星式载人飞船
D、目前,只有美国、俄罗斯、中国能够独立发生航天飞机
第4题
空间机器人的机械臂及其控制框图如图10-7所示。已知电机与机械臂构成的手臂传递函数为
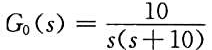
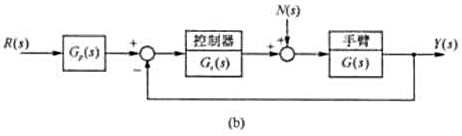
图10-7空间机器 人的机械臂控制系统
设计要求:
(1)当Gc(s) =K时,确定K的合适取值,使系统阶跃响应的超调量σ%=4.5% ;
(2)采用ITAE优化方法,并选取ωn=10,设计合适的PD控制器Gc(s),确定对应的前置滤波器Gp(s);
(3)采用ITAE优化方法,设计合适的Pl控制器Gc(s)和相应的前置滤波器Gp(s);
(4)采用ITAE优化方法和ωn=10,设计合适的PID控制器Gc(s) 和前置滤波器Gp (s);
(5)对比上述每种设计效果,列表比较系统对单位阶跃输入响应的σ%, tpp, ts(Δ=2%)以及由单位阶跃扰动引起的输出y (t) 的最大值和稳态值。
第6题
A.太空垃圾这一巨大隐患,将会给人类带来毁灭性的灾难。
B.科学家要考虑研发更加耐碰撞的材料来制造航天器。
C.2003 年2月1日 美国哥伦比亚航天飞机太空爆炸可能与太空垃圾有关。
D.未来的航天器上将会装上自动探测并能绕开太空垃圾的一种仪器。
第7题
A.由操作机
B.控制器
C.伺服驱动系统
D.检测传感装置
第9题
A.操作系统属于系统软件
B.操作系统只负责管理内存储器,而不管理外存储器
C.UNIX是一种操作系统
D.计算机的处理器、内存等硬件资源也由操作系统管理
 客服
客服
 TOP
TOP

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

































