 重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
考虑方程(17.4.7)所给的考伊克(或者适应性预期)模型,即:

假定在原始模型中ut服从一阶自回归模式 ,其中ρ是自相关系数,而εt满足全部经典OLS假定。
,其中ρ是自相关系数,而εt满足全部经典OLS假定。
a.如果ρ=λ,那么能不能用OLS估计考伊克模型?
b.这样得到的估计值将是无偏的?一致的?
c.假定ρ=λ的合理性如何?
 更多“考虑方程(17.4.7)所给的考伊克(或者适应性预期)模型,即:假定在原始模型中ut服从一阶自回归模式”相关的问题
更多“考虑方程(17.4.7)所给的考伊克(或者适应性预期)模型,即:假定在原始模型中ut服从一阶自回归模式”相关的问题
第1题
考虑模型

即误差项服从AR(2)模式,其中 为白噪音误差项。在考虑二阶自回归情况下,勾勒出估计此模型的步骤。
为白噪音误差项。在考虑二阶自回归情况下,勾勒出估计此模型的步骤。
第2题
考虑方程(18.37)中的误差纠正模型。证明:如果你添加误差纠正项的另一个滞后 ,这个方程便出现完全多重共线性的问题。[提示:证明
,这个方程便出现完全多重共线性的问题。[提示:证明 的一个完全线性函数。]
的一个完全线性函数。]
第3题
估计p:科克伦-奥克特迭代程序。作为对此程序的一个说明,考虑双变量模型:

及AR(1)模式

于是科克伦和奥克特推荐如下步腺来估计ρ。
(1)用通常的OLS方法估计方程①并得到残差ut。顺便指出,你可以在模型中包含不止一个X变量。
(2)利用第1步得到的残差做如下回归:

这是方程②在实证中的对应表达式。
(3)利用方程③中得到的 ,估计广义差分方程(129.6)。
,估计广义差分方程(129.6)。
(4)由于事先不知道方程③中得到的 是不是ρ的最佳估计值,所以把第3步中得到的
是不是ρ的最佳估计值,所以把第3步中得到的 值代入原回归①,并得到新的残差解
值代入原回归①,并得到新的残差解 为
为


(5)现在估计如下回归

它类似于方程③,并给出p的第二轮估计值。由于我们不知道p的第二轮估计值是不是真实p的最佳估计值,所以我们进入第三轮估计,如此等等。这正是科克伦-奧克特程序被称为迭代程序的原因。我们该把这种(愉快的)轮回操作进行到什么程度呢?一般的建议是,当p的两个相邻估计值相差很小(比如不是0.01或0.005)时,便可停止迭代。在工资-生产率一例中,在停止之前约需要3次迭代。
a.利用科克伦-奥克特迭代程序,估计工资生产率回归(12.5.2)的p.在得到ρ的“最终”估计值之前需要多少次迭代?
b.利用a中得到的p的最终估计值,在去掉第一次观测和保留第一次观测的情况下,估计工资生产率回归。结果有何差异?
c.你认为在变换数据以解决自相关问题时保留第一次观测重要吗?
第4题
考虑模型: (1)。为了找出此模型是否因为漏掉变量X3而成为一个误设的模型,你决定用模型(1)给出的残差仅仅对X3一个变量做回归(注:在此回归中有一截距项)。然而,拉格朗日乘数(LM)检验要求你用方程(1)的残差兼对X2和X3及一常数项做回归。为什么你用的程序很可能是不适当的?
(1)。为了找出此模型是否因为漏掉变量X3而成为一个误设的模型,你决定用模型(1)给出的残差仅仅对X3一个变量做回归(注:在此回归中有一截距项)。然而,拉格朗日乘数(LM)检验要求你用方程(1)的残差兼对X2和X3及一常数项做回归。为什么你用的程序很可能是不适当的?
第5题
参考本章讨论的美国储蓄-收入回归。与方程(9.5.1)不同,考虑如下模型:

其中Y为储蓄,x为收入。
a.估计上述模型,并与方程(9.5.4)的结论相比较。哪个模型更好?
b.你如何解释此模型中虚拟变量的系數?
c.如我们在有关异方差性的章节中将看到的那样,对因变量取对数常常会减小数据中的异方差性。分两个期间将Y的对数对X做回归,看本例中是否如此?并看一下两个期间的误差方差在统计上是否相同。若相同,则可以按照本章中给出的方法将数据混合,再用邹至庄检验。
第6题
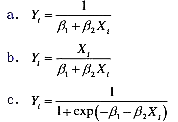
考虑如下非随机模型(即不含随机误差项的模型)。它们是线性回归模型吗?若不是,可以通过适当的代数变换使之转化为线性模型吗?
第7题
假设你把方程(7.9.1)中给出的柯布一道格拉斯模型表达成如下形式

如果你做这个模型的对数变换,你将在等式右边得到 作为干扰项。
作为干扰项。
a.为了能应用经典正态线性回归模型的性质,你需要对 做什么概率假设?你会怎样利用教材表7-3中的数据去检验这个假设。
做什么概率假设?你会怎样利用教材表7-3中的数据去检验这个假设。
b.同样的假设也适用于ut吗?为什么?
第8题
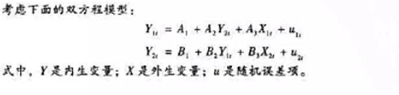
考虑下面的模型:

式中,Y是内生变量;X是外生变量;u是随机误差项。根据这个模型,得到简化形式的回归模型如下:

a.从这些简化方程中,你能估计出哪些结构系数?
b.如果先验地知道A2=0和A1=0,那么答案有什么改变?
第9题
考虑以下修改的凯恩斯收入决定模型:
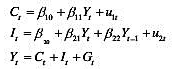
其中C=消费支出;
I=投资支出;
Y=收入;
G=政府支出。
假定Gt和Yt-1是前定的。
a.求约简型方程并判定上述方程中哪些是可识别的(恰好或过度)。
b.你将用什么方法估计过度识别方程和恰好识别方程中的参数?说明理由。
第10题
a.求简化形式的回归模型。
b.判定哪个方程是可识别的,
c.对于可识别方程,使用哪种方法进行估计,为什么?
d.假定先验地知道Ay=0.上述问题的答案有什么变化,为什么?

 客服
客服
 TOP
TOP

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!































