网友您好,
请在下方输入框内输入要搜索的题目:
搜题
题目内容
(请给出正确答案)
[主观题]
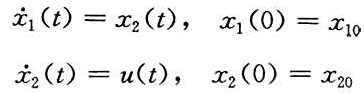
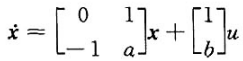
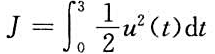
设系统状态方程为性能指标为试分别用连续动态规划和调节器方法确定最优控制u* (t)。
设系统状态方程为性能指标为试分别用连续动态规划和调节器方法确定最优控制u* (t)。
设系统状态方程为
性能指标为
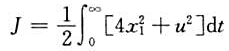
试分别用连续动态规划和调节器方法确定最优控制u* (t)。
查看答案
更多“设系统状态方程为性能指标为试分别用连续动态规划和调节器方法确定最优控制u* (t)。”相关的问题
第1题
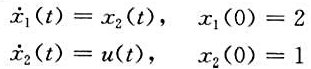
设系统状态方程及初始条件为试确定最优控制u* (t),使性能指标为极小,其中终端时间tf未定,
设系统状态方程及初始条件为试确定最优控制u* (t),使性能指标为极小,其中终端时间tf未定,
点击查看答案
设系统状态方程及初始条件为

试确定最优控制u* (t),使性能指标
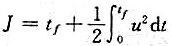
为极小,其中终端时间tf未定,x (tf) =0。
第2题
设系统状态方程及初始条件为性能指标为要求达到x (tf) =0,试求: (1) t1=5时的最优控
设系统状态方程及初始条件为性能指标为要求达到x (tf) =0,试求: (1) t1=5时的最优控
点击查看答案
设系统状态方程及初始条件为
性能指标为

要求达到x (tf) =0,试求: (1) t1=5时的最优控制u* (t); (2) tf自由时的最优控制u*(t)。
第4题
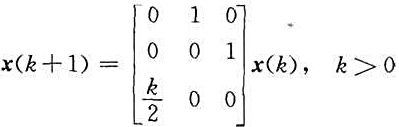
已知系统的状态方程为边界条件为x1 (0) =X2 (0) =1, X1 (3) =X2 (3) =0,试求
已知系统的状态方程为边界条件为x1(0) =X2(0) =1, X1(3) =X2(3) =0,试求
点击查看答案
已知系统的状态方程为

边界条件为x1(0) =X2(0) =1, X1(3) =X2(3) =0,试求使性能指标.
取极小值的最优控制U* (t) 以及最优轨线X*(t)。
 其中A为2×2常数矩阵。已知当
其中A为2×2常数矩阵。已知当
 和A。
和A。第7题
设系统状态方程为试设计一状态观测器,使其极点为-r、-2r(r>0) ,并画出其结构图。
设系统状态方程为试设计一状态观测器,使其极点为-r、-2r(r>0) ,并画出其结构图。
点击查看答案
设系统状态方程为

试设计一状态观测器,使其极点为-r、-2r(r>0) ,并画出其结构图。
第8题
设二次积分模型为性能指标为已知θ(0) =ω (0) =1, θ(1) =0,ω (1)自由,试求最优控制u* (t) 和最
设二次积分模型为性能指标为已知θ(0) =ω (0) =1, θ(1) =0,ω (1)自由,试求最优控制u* (t) 和最
点击查看答案
设二次积分模型为

性能指标为
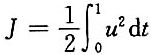
已知θ(0) =ω (0) =1, θ(1) =0,ω (1)自由,试求最优控制u* (t) 和最优轨线θ* (t),ω* (t)。
第9题
设1阶系统方程 ;性能指标已知x (1) =0,某工程师认为从工程观点出发可取最优控制函数u*(t) =-1
设1阶系统方程 ;性能指标已知x (1) =0,某工程师认为从工程观点出发可取最优控制函数u*(t) =-1
点击查看答案
设1阶系统方程 ;性能指标
;性能指标

已知x (1) =0,某工程师认为从工程观点出发可取最优控制函数u*(t) =-1,试分析他的意见是否正确,并说明理由。
第10题
设二阶系统控制约束| u (t) |≤1,当系统末端自由时,求最优控制u. (t), 使性能指标取极小值,并
设二阶系统控制约束| u (t) |≤1,当系统末端自由时,求最优控制u. (t), 使性能指标取极小值,并
点击查看答案
设二阶系统

控制约束| u (t) |≤1,当系统末端自由时,求最优控制u. (t), 使性能指标

取极小值,并求最优轨线x*(t)。

热门考试
全部 >
相关试卷
全部 >
2024年一级造价工程师《技术与计量(交通运输)》模拟卷(十)2024年一级造价工程师《技术与计量(交通运输)》模拟卷(九)2024年一级造价工程师《技术与计量(交通运输)》模拟卷(八)2024年一级造价工程师《技术与计量(交通运输)》模拟卷(七)2024年一级造价工程师《技术与计量(交通运输)》模拟卷(六)2024年一级造价工程师《技术与计量(交通运输)》模拟卷(五)2024年一级造价工程师《技术与计量(交通运输)》模拟卷(四)2024年一级造价工程师《技术与计量(交通运输)》模拟卷(三)2024年一级造价工程师《技术与计量(交通运输)》模拟卷(二)2024年一级造价工程师《技术与计量(交通运输)》模拟卷(一)



























