网友您好,
请在下方输入框内输入要搜索的题目:
搜题
题目内容
(请给出正确答案)
[主观题]
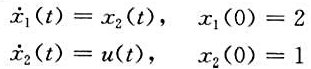
设系统的状态方程为其中A为2×2常数矩阵。已知当试求系统的状态转移矩阵和A。
设系统的状态方程为 其中A为2×2常数矩阵。已知当
其中A为2×2常数矩阵。已知当

试求系统的状态转移矩阵 和A。
和A。
查看答案
更多“设系统的状态方程为其中A为2×2常数矩阵。已知当试求系统的状态转移矩阵和A。”相关的问题
 的状态转移矩阵
的状态转移矩阵 为
为
第4题
设系统状态方程及初始条件为试确定最优控制u* (t),使性能指标为极小,其中终端时间tf未定,
设系统状态方程及初始条件为试确定最优控制u* (t),使性能指标为极小,其中终端时间tf未定,
点击查看答案
设系统状态方程及初始条件为

试确定最优控制u* (t),使性能指标
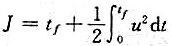
为极小,其中终端时间tf未定,x (tf) =0。
第5题
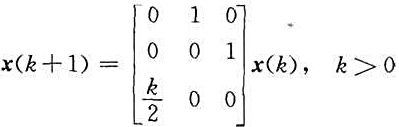
己知线性时不变系统状态方程的参数矩阵为求:(1)将参数矩阵化为A对角线形式;(2)判断系统可控性
己知线性时不变系统状态方程的参数矩阵为求:(1)将参数矩阵化为A对角线形式;(2)判断系统可控性
点击查看答案
己知线性时不变系统状态方程的参数矩阵为
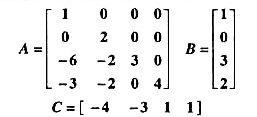
求:(1)将参数矩阵化为A对角线形式;(2)判断系统可控性与可观性;(3)系统函数H(s).
第6题
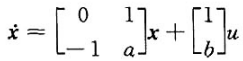
设系统状态方程为试设计一状态观测器,使其极点为-r、-2r(r>0) ,并画出其结构图。
设系统状态方程为试设计一状态观测器,使其极点为-r、-2r(r>0) ,并画出其结构图。
点击查看答案
设系统状态方程为

试设计一状态观测器,使其极点为-r、-2r(r>0) ,并画出其结构图。
第7题
设系统状态方程及初始条件为性能指标为要求达到x (tf) =0,试求: (1) t1=5时的最优控
设系统状态方程及初始条件为性能指标为要求达到x (tf) =0,试求: (1) t1=5时的最优控
点击查看答案
设系统状态方程及初始条件为
性能指标为

要求达到x (tf) =0,试求: (1) t1=5时的最优控制u* (t); (2) tf自由时的最优控制u*(t)。
第8题
设矩阵,矩阵B=(kE+A)2,其中k为常数,求对角矩阵A,使B与A相似。
设矩阵,矩阵B=(kE+A)2,其中k为常数,求对角矩阵A,使B与A相似。
点击查看答案
设矩阵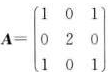 ,矩阵B=(kE+A)2,其中k为常数,求对角矩阵A,使B与A相似。
,矩阵B=(kE+A)2,其中k为常数,求对角矩阵A,使B与A相似。
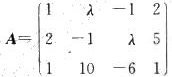 ,其中λ为参数,求矩阵A的秩。
,其中λ为参数,求矩阵A的秩。第10题
设A, B为n阶矩阵,2A-B-AB=E, A2=A,其中E为n阶单位矩阵。(1) 证明: A-B为可逆矩阵,并求(A-B)^-1
设A, B为n阶矩阵,2A-B-AB=E, A2=A,其中E为n阶单位矩阵。(1) 证明: A-B为可逆矩阵,并求(A-B)^-1
点击查看答案
设A, B为n阶矩阵,2A-B-AB=E, A2=A,其中E为n阶单位矩阵。
(1) 证明: A-B为可逆矩阵,并求(A-B)^-1;
(2) 已知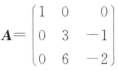 ,试求矩阵B。
,试求矩阵B。

热门考试
全部 >
相关试卷
全部 >
2024年一级造价工程师《技术与计量(交通运输)》模拟卷(十)2024年一级造价工程师《技术与计量(交通运输)》模拟卷(九)2024年一级造价工程师《技术与计量(交通运输)》模拟卷(八)2024年一级造价工程师《技术与计量(交通运输)》模拟卷(七)2024年一级造价工程师《技术与计量(交通运输)》模拟卷(六)2024年一级造价工程师《技术与计量(交通运输)》模拟卷(五)2024年一级造价工程师《技术与计量(交通运输)》模拟卷(四)2024年一级造价工程师《技术与计量(交通运输)》模拟卷(三)2024年一级造价工程师《技术与计量(交通运输)》模拟卷(二)2024年一级造价工程师《技术与计量(交通运输)》模拟卷(一)



























