设被控系统动态方程为试设计全维状态观测器,使闭环极点位于-r,-2r (r>0),并画出状态变量图。
设被控系统动态方程为
试设计全维状态观测器,使闭环极点位于-r,-2r (r>0),并画出状态变量图。
第1题
已知被控对象的动态方程
其中

要求设计单位斜坡输入时的内模控制器,使系统闭环极点为S1.2=-1±jl, s3=s4=-10, 并给出单位斜坡内模控制系统结构图与跟踪误差e (t) 的响应曲线。
第3题
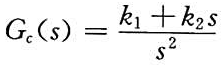
设单位斜坡内模控制系统如图9-18所示,其中被控对象
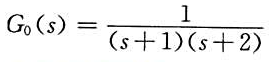
X1(t)和x2(t)为状态变量。试设计合适的内模控制器
及状态反馈增益k3和k4,使系统的闭环极点为S1=S2= S3=S4=-2,且系统对单位斜坡输入的稳态跟踪误差为零,最后绘出系统的单位斜坡响应曲线。
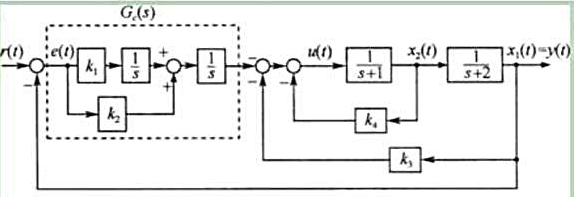
图9-18单位斜坡内膜控制系统
第4题
设系统状态方程为

试设计一状态观测器,使其极点为-r、-2r(r>0) ,并画出其结构图。
第5题
已知电枢控制的直流伺服电机的微分方程组及传递函数为
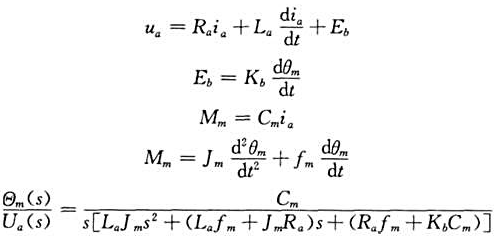
(1)设状态变量 ,输出量y=θm, 试建立其动态方程;
,输出量y=θm, 试建立其动态方程;
(2)设状态变量 试建立其动态方程;
试建立其动态方程;
(3)设 ,确定两组状态变量间的变换矩阵T。
,确定两组状态变量间的变换矩阵T。
第6题
设数字控制系统如图7-14所示,其中G(z)包括了零阶保持器和被控对象。已知被控对象
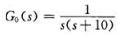
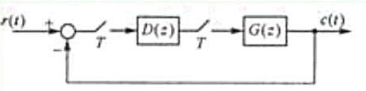
图7-14数字控制 系统,
若采样周期T=0.1s,要求:
(1)当D (z) =K时,计算脉冲传递函数G (z) D (z);
(2)求闭环系统的z特征方程;
(3)计算使系统稳定的K的最大值;
(4)确定K的合适值,使系统的超调量不大于30%;
(5)采用(4)中得到的增益K,计算闭环脉冲传递函数Φ(z), 并绘出系统的单位阶跃响应曲线;
(6)取K=0.5Kmax,求系统闭环极点及超调量;
(7)在(6)所给出的条件下,画出系统的单位阶跃响应曲线。
第7题
设被控对象为
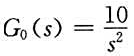
试设计1个带有PID控制器和前置滤波器的单位负反馈控制系统,使系统的阶跃响应具有最优的ITAE指标,峰值时间为0.8s左右,并给出系统的单位阶跃响应曲线。
第9题
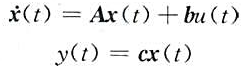
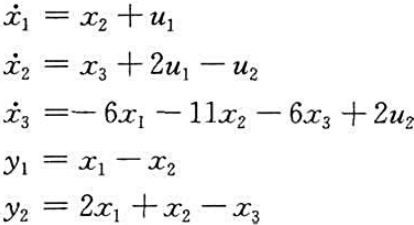
已知一系统的动态方程为
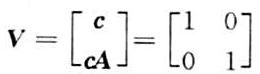
试求:(1)判别系统的能控性和能观性;
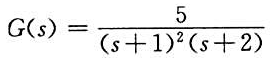
(2)求系统的传递函数;
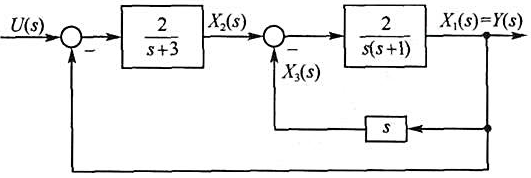
(3)画出系统的状态图;
(4)判别系统的稳定性。