 重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
重要提示:
请勿将账号共享给其他人使用,违者账号将被封禁!
 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
应:
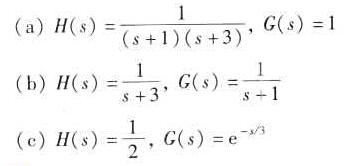
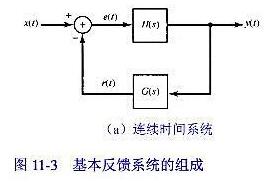
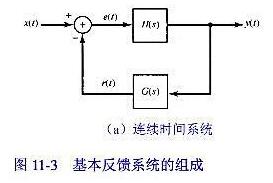
 更多“考虑图11-3(a)所示的基本反馈系统,求下列每个正向通路和反馈通路系统函数的闭环系统单位冲激响”相关的问题
更多“考虑图11-3(a)所示的基本反馈系统,求下列每个正向通路和反馈通路系统函数的闭环系统单位冲激响”相关的问题
第1题
应:

第2题
反馈系统的开环系统函数表达式为

(1)画出根轨迹;
(2)求两分支的交点值;
(3)要使闭环系统的冲激响应不呈现振荡,求K值范围.
第3题
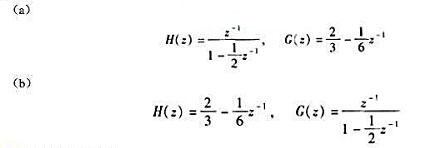
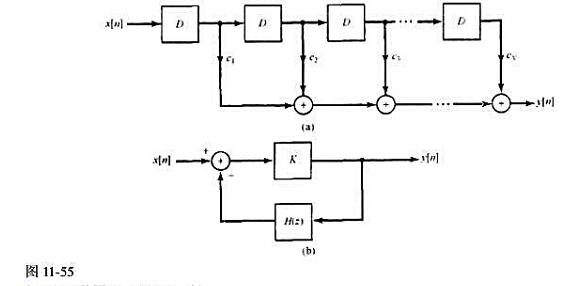
以实现一个递归滤波器。为此,考虑示于图11-55(b)中的结构,其中H(z)是图11-55(a)的非递归线性时不变系统的系统函数。试求该反馈系统总的系统函数,并求出关于整个系统输入和输出的差分方程。
(b)现在假定图11-55(b)中的H(z)是一个递归线性时不变系统的系统函数,这是假设
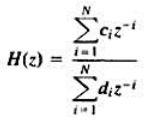
证明:如何能求得系数K,c1,...,cn和d0,...,dN的值,使得闭环系统函数为
其中ai和bi都是已给定的系数。
第4题
(a)考虑图11-60所示的离散时间反馈系统。假设
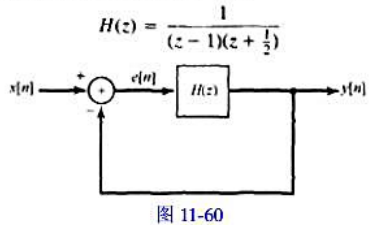
证明该系统在下述意义下能够跟踪一个单位阶跃,若x[n]=u[n],则

(b)更一般的是,考虑图11-60所示的反馈系统,并假设闭环系统是稳定的。假定H(z)有一个极点在z=1,证明:该系统能够跟踪一个单位阶跃。
(c)上面(a)和(b)的结果是在离散时间中的,与习题11.57和习题11.58讨论的连续时间系统的结果相对应。在离散时间中,也能够考虑在经过若干步以后完全地跟踪给定输入的系统设计问题。这种系统称为临界阻尼反馈系统(deadbeat feedback system)。
现考虑图11-60所示的离散时间系统,其 。
。
证明:整个闭环系统是一个临界阻尼反馈系统,而且在经过一步以后,就能完全跟踪上一个阶跃输入,即若x[n]=u[n],那么n≥1时e[n]=0。
(d)证明图11-60的反馈系统,在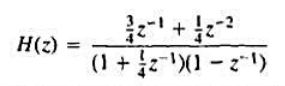 下是一个临界阻尼系统,并具有如下跟踪性质:在经过若干步之后,输出能完全跟踪一个单位阶跃,问在哪一步,误差e[n]首先到达零?
下是一个临界阻尼系统,并具有如下跟踪性质:在经过若干步之后,输出能完全跟踪一个单位阶跃,问在哪一步,误差e[n]首先到达零?
(e)更一般地,对于图11-60所示的反馈系统,求出使y[n]在n≥N后完全跟踪上一个单位阶跃的H(z);事实上,这是要使

其中ak是给定的常数。
(f)若图11-60所示系统中的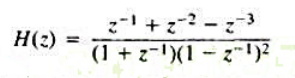 。
。
证明:该系统在经过两步以后就能完全跟踪上一个斜坡信号x[n]=(n+1)u[n]。
第5题
考虑一个连续时间反馈系统,其闭环极点满足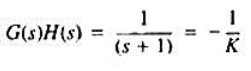 ,利用奈奎斯特图和奈奎斯特稳定判据确定该闭环系统是稳定的K值范围。
,利用奈奎斯特图和奈奎斯特稳定判据确定该闭环系统是稳定的K值范围。
第6题
有图如下所示.试求:

(1)从a到h的所有基本通路;
(2)从a到h的所有简单通路;
(3)从a到h的距离.
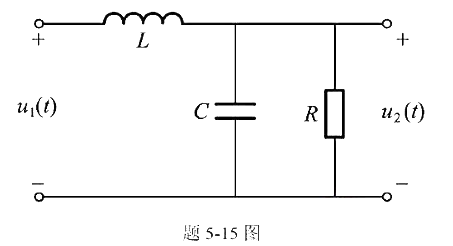
第7题
如题 5-15图所示二阶系统,已知L=1H, C=1F, R=1Ω, Us(t)=Ᵹ(t)。 试求以Uc(t )为响应时的冲激响应h(t)。
第8题
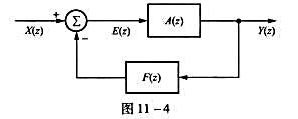
若图11-4所示反馈系统中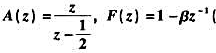 (β为实数),为使系统稳定,求β值范围.
(β为实数),为使系统稳定,求β值范围.
第9题
考虑图11-3(a)所示的基本连续时间反馈系统,确定下列H(s)和G(s)的增益和相位裕度: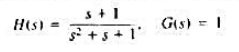 。
。
第10题
 来完成。具体而言,画出K>0时的根轨迹,并标出使阻尼能得到明显改善的增益值K。
来完成。具体而言,画出K>0时的根轨迹,并标出使阻尼能得到明显改善的增益值K。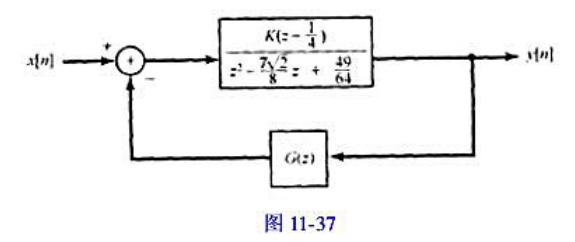

 客服
客服
 TOP
TOP

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!































